



کنترل غیر خطی در متلب
سیستمهای کنترل غیر خطی (Nonlinear Control Systems) شاخهای از دروس مهندسی کنترل در مقطع کارشناسی ارشد است که به بررسی سیستمهای دینامیکی غیر خطی و طراحی کنترلکننده برای این سیستمها میپردازد. سیستمهای غیر خطی، سیستمهایی هستند که رفتار آنها با معادلات خطی، قابل توصیف نیست.
در درسهایی که در آنها به بررسی، تحلیل و کنترل سیستمهای خطی میپردازند، فرضهای محدودکننده زیادی وجود دارند؛ در حدی که حوزه کاربردی بسیار محدودی برای مباحث مطرح شده میتوان تعریف کرد. در حقیقت همه سیستمهای واقعی، غیر خطی هستند و تحلیل و کنترل سیستمهای دینامیکی غیر خطی، ابزاری است که امکان بررسی سیستمهای واقعی را برای ما فراهم میکند.
کنترل غیر خطی در متلب، به معنای استفاده از ابزارها و توابع متلب، برای طراحی و شبیهسازی کنترلکنندههای غیر خطی برای سیستمهای دینامیکی غیر خطی است.
انجام پروژه متلب با کمترین قیمت
در مطالعه سیستمهای کنترل غیر خطی در رشته مهندسی کنترل، مراجع مکتوب مربوط به این درس در دو بخش ارائه میشوند: اول، بخش تحلیل و آنالیز سیستمهای دینامیکی غیر خطی و دوم، بخش طراحی کنترل کننده برای سیستم های غیر خطی. با توجه به تئوریهای ریاضی بسیار توسعه یافته در زمینه تحلیل و طراحی سیستمهای غیرخطی، این درس از نظر تئوریک یکی از دروس غنی و کاربردی است.

مطالعه و بررسی سیستمهای دینامیکی در بسیاری از دانشکدههای ریاضی و زمینههای تحصیلی میان رشتهای از اهمیت بالایی برخوردار است. از این رو، این درس در مقطع کارشناسی ارشد و یا دکترای تخصصی به دانشجویان ارائه میشود. البته در دانشگاههای ایران، خلاصه مفاهیم این درس به علاوه درس کنترل دیجیتال در قالب یک درس در مقطع کارشناسی مهندسی برق-کنترل به دانشجویان ارائه میشود که مقدمه خوبی برای ورود به حوزه مطالعاتی سیستمهای غیر خطی است.
روشهای طراحی و تحلیل سیستمهای دینامیکی غیر خطی در سایر رویکردهای کنترلی، کاربردهای فراوانی دارد و به همین دلیل، این درس به عنوان یک پیش نیاز آموزشی مهم برای گذراندن سایر درسهای مهندسی کنترل در مقاطع تحصیلات تکمیلی است. همچنین در مقطع دکترای تخصصی، کنترل این درس یکی از مهم ترین منابع ارزیابی و آزمون جامع دکتری است.
ترکیب ایدههای مربوط به کنترل غیرخطی با هوش مصنوعی (مانند سیستمهای فازی، عصبی و تکاملی) بخش مهم و عمدهای از روش های مدرن مهندسی کنترل را تشکیل میدهند که با عنوان کلی سیستمهای کنترل هوشمند شناخته میشوند. برای فهم دقیق و کامل شیوه عملکرد روشهای کنترل هوشمند، تسلط بر شیوهها و مفاهیم کنترل غیر خطی ضروری است.
توانایی تحلیل سیستمهای دینامیکی غیرخطی، علاوه بر کاربرد در زمینه کنترل، در تحلیل و بررسی الگوریتمهای عددی هم که در قالب یک سیستم دینامیکی قابل توصیف هستند، نقش مهمی دارند. برای مثال، روند تغییر ضرایب در یک شبکه عصبی، زمانی که با الگوریتم یادگیری پس انتشار در حال آموزش دیدن است، یک فرایند دینامیکی غیر خطی است و بررسی عملکرد، همگرایی و کارایی این الگوریتم، بدون دانش در زمینه تحلیل سیستمهای دینامیکی غیر خطی، امکان پذیر نخواهد بود.
مطالب پیشنهادی:
ابزارهای متلب برای تحلیل و کنترل سیستمهای غیر خطی
متلب مجموعهای از ابزارهای قدرتمند را برای تحلیل و کنترل سیستمهای غیر خطی ارائه میدهد، از جمله:
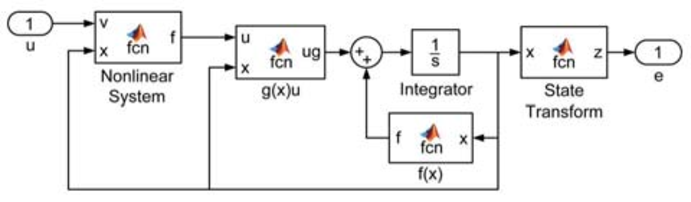
بلوکهای سیمولینک
سیمولینک محیطی گرافیکی برای شبیهسازی سیستمهای دینامیکی است. بلوکهای مختلفی برای شبیهسازی سیستمهای غیر خطی در سیمولینک وجود دارد، مانند بلوکهای تابع ماتریس، بلوکهای تابع انتگرال و بلوکهای تابع دیفرانسیل.
توابع متلب
توابع متلب برای انجام محاسبات ریاضی و مهندسی مربوط به کنترل غیر خطی، مانند حل معادلات دیفرانسیل تصادفی، محاسبه مشتق و انتگرال، و تحلیل پایداری سیستم، استفاده میشوند.
ابزارهای خطیسازی
ابزارهای خطیسازی برای تبدیل سیستمهای غیر خطی به سیستمهای خطی معادل در نقطه تعادل استفاده میشوند. این امر، تحلیل و طراحی کنترلکننده برای سیستمهای غیر خطی را سادهتر میکند.
روشهای کنترل غیرخطی در متلب
برخی از روشهای متداول برای کنترل غیر خطی در متلب عبارتند از:
کنترل لغزشی
کنترل لغزشی روشی برای کنترل سیستمهای غیر خطی است که بر اساس سطوح لغزشی طراحی میشود. سطوح لغزشی سطوحی در فضای حالت هستند که در آن سیستم به حالت مطلوب خود میرسد.
کنترل تطبیقی
کنترل تطبیقی روشی برای کنترل سیستمهای غیر خطی است که پارامترهای کنترلکننده را به طور آنلاین با توجه به تغییرات پارامترهای سیستم تنظیم میکند.
کنترل فازی
کنترل فازی روشی برای کنترل سیستمهای غیر خطی است که بر اساس منطق فازی طراحی میشود.
کنترل غیر خطی در متلب در طیف گستردهای از کاربردها، از جمله رباتیک، کنترل فرآیند، هوافضا و خودرو، استفاده میشود.


.svg)
